


官方微信视频号
![]()
神奇!“水滴+铁珠”秒变机器人,移动速度可达2米/秒,还有清洁功能
时间:2021-06-24 09:33:00
来源:网络
前言:仿生磁驱动液体操作微机器人 Hydrobot可以在任意路径上驱动液滴移动,速度最高可达 2 米/秒
把一吨水从一个地方输送到另一个地方,我们可以想出很多种方法,但如果我们需要精准移动几滴指定的小水珠呢?
这涉及到一门技艺叫做微流控输运,顾名思义,即一种微尺度下的流体输运方法。对流动液滴精准操控,在化学合成分析、药物筛选、细胞培养等领域用途广泛,对许多学科实验来讲不可或缺。
迄今为止,液相操作主要依靠具有特定形态或化学成分的固体表面来打破固、液、气三相接触线的不对称性,这种方法通常效率低,可控性有限,随着技术升级,近年来基于外界刺激(如光场、电场、热场)的智能液体操纵策略得到了广泛应用,但操作方法却不够简便。
还有没有更好的解决方案?很多科学团队都在不断探索。

移动水滴
如今,来自香港城市大学和中国科学院的科研人员联合设计了一种新装置,他们使用一个具有极亲水表面的小铁珠,发明出了仿生磁驱动液体操作微机器人 Hydrobot,它可以在任意路径上驱动液滴移动,速度最高可达 2 米/秒(2000 体长/秒),随着小铁珠表面积的增加,Hydrobot 可以操纵更多的水。
这一策略还打破了空间限制,允许液滴沿三维 360° 圆移动,实现在任何坡度爬坡或下坡,未来其应用场景包括清洁难以到达的微环境或用来运送微物质。

Hydrobot 跟随外部磁铁控制,携带液滴移动或停止
(来源:Cell Reports Physical Science)
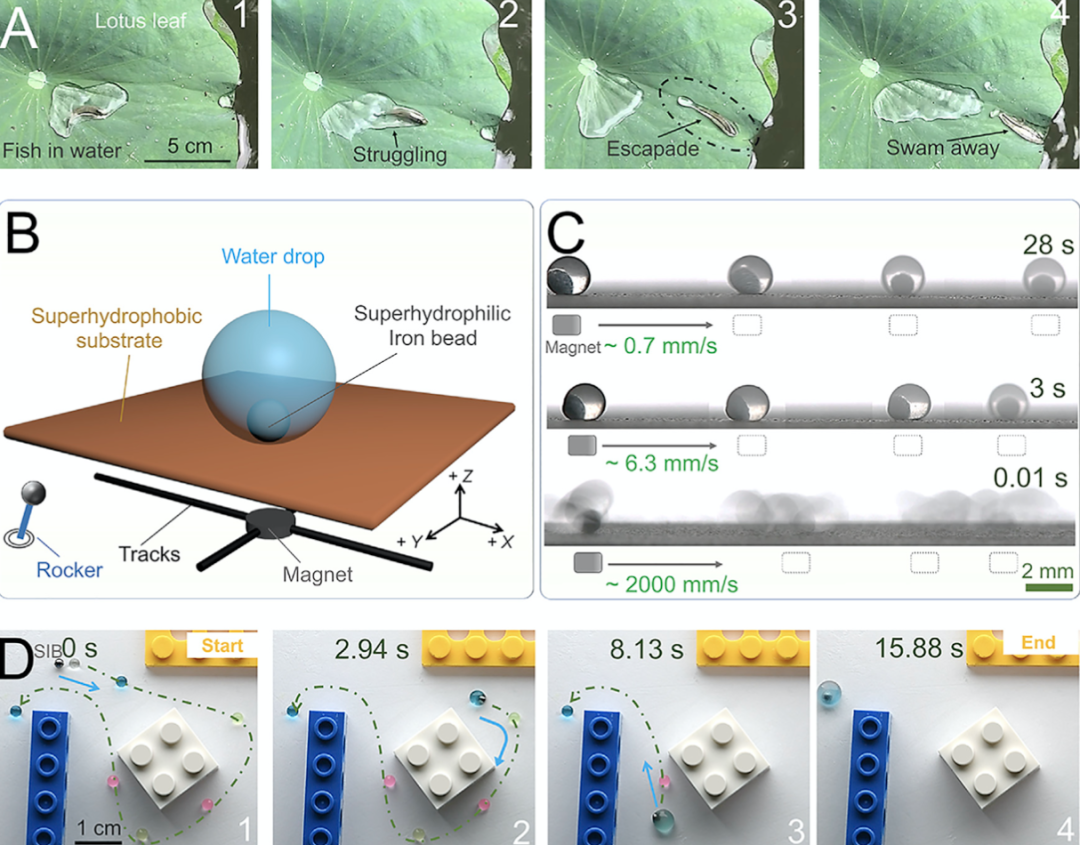
论文的第一作者、香港城市大学生物医学工程系的博士后研究员 Yifan Si 表示:“Hydrobot 的设计灵感来自在荷叶上蹦蹦跳跳的小鱼,鱼鳞具有高度的亲水性,能紧紧地粘附水滴,特别是在疏水表面。受这种自然现象启发,我们开发了 Hydrobot,其所涉及的材料很容易获取,能为软机器人的设计提供全新的思路。”
▍解决 3 个问题
业界对于移动小液滴这件事,一直面临着速度、体积和空间三方面的挑战。
首先,很难用较高的速度(每秒几米)精确操纵液体运动,更具挑战性的是,随机停止或移动液滴;同时,也难以在三维空间中实现液体操纵;此外,大多数的液体操纵研究都是基于空气中的超疏水表面,如何在其他基质或环境中扩展和实现液体操纵一直是业界关注的问题。
那么,如何攻克这些挑战?正如论文作者所说,灵感来自超亲水性鱼类能够将水从超疏水性荷叶中带走的自然现象。
通过利用内部超亲水铁珠(SIB)与液体之间的粘附力,在外加磁场的引导下,液滴在超疏水表面上移动速度可达 2 米/秒(接近每秒 2000 体长),并且可以根据需要随时停止。Hydrobot 可以像毫米级的软机器人一样在狭窄的空间内游走,完成清洁、物体输送和货物释放等复杂指令任务。
超疏水基底上的磁驱动液体操纵
就像荷叶上的水滴一样,水滴能以近乎完美的球形出现在超高速疏水材料表面上,当 SIB 被放置在水滴中,会立即被水包围,形成一个新的整体,在可移动外磁体的驱动下,系统集成电路可以随磁体位置在二维 X-Y 平面上实现任意移动路线。
SIB 和水之间的高粘附力,可以提供足够的性能来保持水滴高速运动,研究人员在 4 个数量级的速度范围内测试了水滴特定的可操纵。理论上,这样的磁驱动操纵策略的速度可以慢到 0 毫米 / 秒,中速可实现 6.3mm/s 的液滴操纵,在更快的情况下,研究人员在 0.01 秒内完成 2 厘米的移动,平均速度为 2000 毫米 / 秒。在论文中,研究人员表示,这还并不是能达到的最高速度。
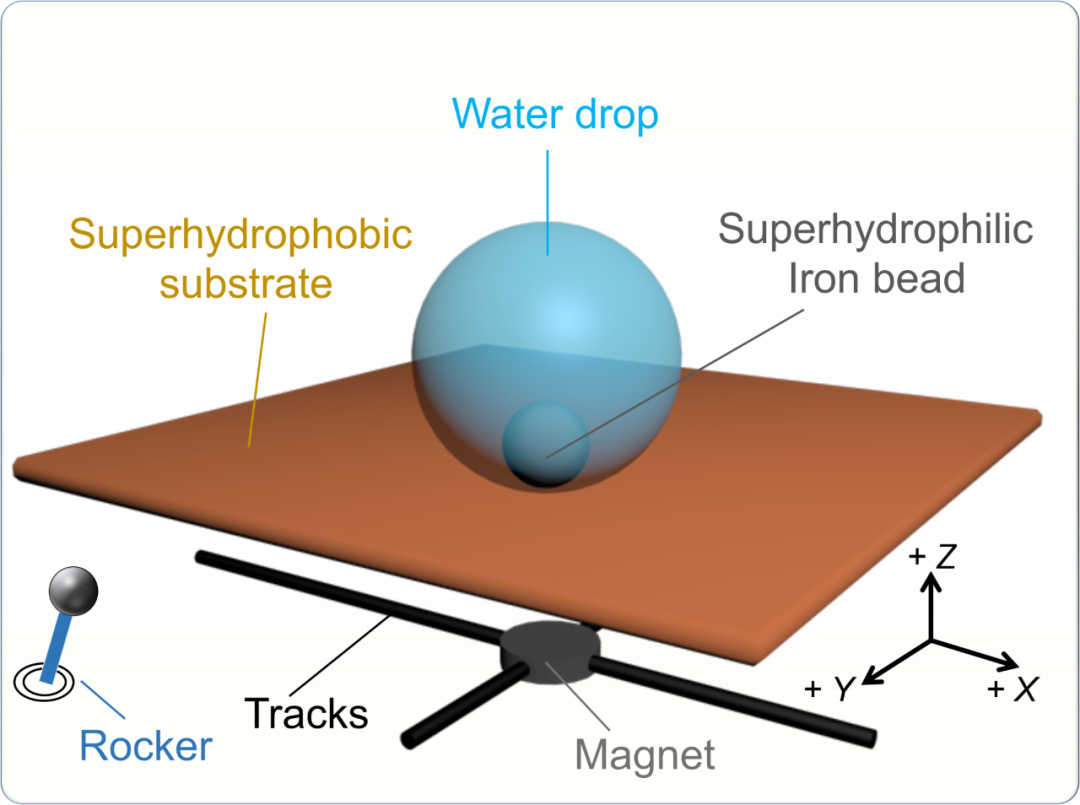
磁驱动机器人 Hydrobot 示意图
此外,研究人员还介绍了一个平台,可以编程实现液滴在复杂狭窄空间中的快速准确移动,研究人员用水滴模拟了《吃豆人》游戏,实现了多个液滴的连续聚合,在磁铁的驱动下,液滴可以进行多次转向、移动或停止动作,6 个彩色微滴在 16 秒内聚集成一个大的微滴,并能保持良好的可控性和运动性。

《吃豆人》游戏
在这种基于固液粘附力的液滴操纵策略中,固体表面积很关键。换言之,SIB 的表面积对液体操纵的程度有决定性影响。
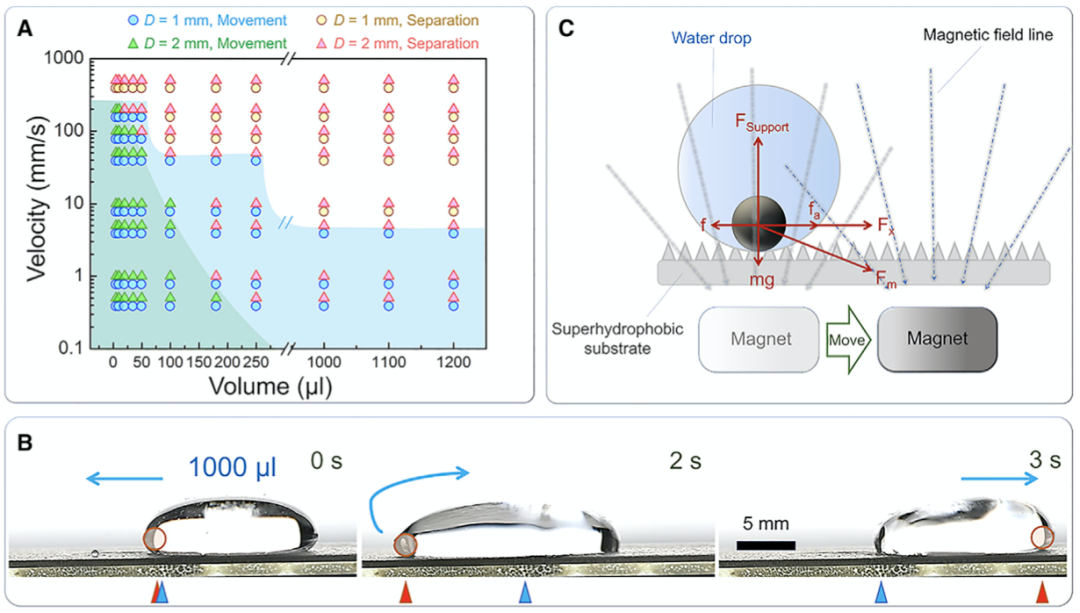
磁驱动液体操纵的机理
此外,研究人员还测试了 Hydrobot 在三维空间的液体操纵能力,这需要克服另一项挑战。
荷叶表面水滴可以自由滚动,具有表面自清洁特性,这称为荷叶效应;而玫瑰花瓣在超疏水状态下,微液滴可附着在其表面而不掉落,这称为花瓣效应。
超疏水表面的高运动性与高附着力之间存在着不可调和的矛盾,且由于重力的影响,液滴在三维超疏水表面的可控操纵一直很难实现。
Hydrobot 磁驱动液体操纵策略实现了高运动性和高附着力的统一,以及在三维空间(包括爬坡和 360° 旋转的圆形轨道)对水滴的可控操纵,经过多次旋转后,液滴仍然附着在磁铁表面。这一结果的根本原因是磁铁对 SIB 的吸引力,而不是单纯依靠固液粘附。通过这种机制,研究人员实现了对倒置超疏水玻片上水滴的可控操纵。

在三维空间中移动液滴,完成了液滴 “过山车” 运动
值得关注的是,Hydrobot 磁驱动策略不仅仅局限于超疏水表面,还可以将液体操纵推广到所有类型的低阻环境中,比如在光滑的聚二甲基硅氧烷(PDMS)表面、平坦的超亲水性聚对苯二甲酸乙二酯(PET)衬底上等,这就解决了操控环境的诸多限制问题。
应用场景有哪些?
速度的绝对控制和空间限制的突破,使得磁驱动液体操纵策略在毫米级软机器人科学与工程领域具有良好的应用潜力。对于 Hydrobot 而言,水滴和内部 SIB 配合被视为一个整体。
Hydrobot 可以作为一个清洁机器人来吸附超疏水表面狭窄角落的灰尘。在概念实验中,研究人员用硫酸铜(CuSO4)模拟灰尘,将其放置在由积木构成的封闭狭窄的超疏水表面上。
之后,可以用磁铁操纵水滴机器人穿过一个由积木组成的隧道,然后找到有尘埃的地方。当 Hydrobot 接触到 CuSO4 晶体时,它会迅速溶解,透明的 Hydrobot 逐渐变成蓝色,超疏水基底则变得干净,不同区域的晶体可以一次溶解掉,最终,水滴机器人可以离开工作区,回到起点,整个清洗过程不会对超疏水表面造成任何损坏。

Hydrobot 清理晶体灰尘
目前,无约束毫米级软机器人最重要的用途之一是在人类无法到达的狭窄空间中捕获/运输和卸载微小设备。此前已报道的大多数无约束毫米级软机器人都具有良好的承载能力,然而,让他们执行任务需要复杂的命令和扭曲,这在工程上是一个巨大的挑战。
Hydrobot 可以利用表面张力附着低质量、低密度的物体,例如当机器人通过磁场移动到聚苯乙烯泡沫塑料颗粒上时,这些泡沫颗粒可以立即附着在 Hydrobot 液体表面,然后跟随 Hydrobot 的运动,绕过多个障碍物,最终到达目的地。
研究人员还为 Hydrobot 设计了一种新的 “卸载” 方式,例如通过完全挥发液体,液体和固体之间的粘附力消失,被 “搬运” 的物体就可以自然而然地放在指定位置上,更重要的是,延迟卸载可以通过调节环境温度、水生物体积和相对湿度来实现。
如果一个 Hydrobot 机器人的承载能力有限,多个机器人一起工作,承载能力可以提高很多倍,并且还可以控制它们的运动路径和形式。
研究人员在论文中表示,如何实现多个机器人的近距离协同操作,将是团队下一个研究项目的重点,这或将是仿生微型机器人新兴领域的一个重大进展,有望开拓出更加丰富的应用场景。
“Hydrobot 可能为软机器人的未来设计提供一些新的想法。” Yifan Si 说,他表示,目前大多数软体微机器人都在使用固体材料,但它们的灵活再好,也不会像液体那样灵活,液体天然具备有利属性,比如改变形状和蒸发的能力。通过更多的研究,这些特性可以使 Hydrobot 更加通用。”
推荐新闻
-
喜报|我院荣膺2026年全国五一劳动奖状! ——致敬每一位平凡而伟大的奋斗者
2026-06-25 -
央视聚焦|国家级检测平台赋能具身智能高质量发展——我院承办的2026杭州国际具身机器人场景应用大赛获广泛关注
2026-06-24 -
十大优质项目集中亮相,机器人概念验证中心正式启动
2026-06-08 -
上研院与睿尔曼牵手共同打造具身智能高质量标准化数据集训练场
2025-08-19 -
第一届上海市机器人等数字技术专业职称申报政策宣讲会顺利召开
2025-08-14 -
云上鏖战,智造未来——第十届 “创客中国”智能机器人中小企业创新创业大赛半决赛圆满收官,48强团队晋级总决赛!
2025-08-13 -
国家标准《工业机器人静电安全规范》等三项标准工作启动
2025-05-07 -
关于征集第十届“创客中国”智能机器人中小企业创新创业大赛评委的通知
2025-04-29 -
共探高质量、发布新成果——2025人形机器人产业高质量发展论坛顺利召开
2025-04-27 -
镇江市党政代表团一行赴机器人研究院考察
2025-04-25 -
定立场,测关节,论数据-全国人形机器人检测认证工作组2025年第二次会议于深圳顺利召开
2025-04-25 -
我院承办的第十届“创客中国”智能机器人中小企业创新创业大赛新闻发布会顺利召开
2025-04-18 -
福州人形机器人训练场启动并接入国家级测评平台
2025-04-15 -
安全性能国际接轨启新章——工业机器人CR认证新规研讨于沪召开
2025-04-15 -
政企携手谋新篇---上电科领导西南行暨卡诺普机器人全系列产品CR认证签约仪式在蓉举行
2025-03-12 -
市科委主任骆大进调研机器人研究院:肯定成绩,寄予厚望
2025-03-10 -
行业观察丨马斯克:Optimus人形机器人或将超越特斯拉汽车业务
2025-08-06 -
ABB全系列机器人CR认证战略合作签约
2025-02-25 -
KUKA机器人再添新认证
2025-01-27 -
国评中心与京沪两地人形机器人共建创新中心共同举办人形机器人产业发展论坛
2024-11-20 -
人形机器人检测认证工作组正式成立
2024-11-22 -
守安全底线、 保本体可靠、促智能发展,全国人形机器人检测认证工作组会议顺利召开
2025-02-27 -
我院专家获得"机器人"领域国际电工标准化1906奖
2024-10-14 -
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

