


官方微信视频号
![]()
“天工”人形机器人一体化关节进入全面“体检”阶段
时间:2025-05-13 16:06:48
来源:上海机器人产业技术研究院
作者:小R
一体化关节模组是高度集成的模块,包括高性能力矩电机、高精度传感器、高精度谐波减速机等部件,是人形机器人实现其基本动作和复杂任务执行的核心组件。近日,在国家认监委的指导下,机器人检测认证联盟在上海正式发布实施《人形机器人一体化关节CR认证实施规则》和《机器人一体化关节技术规范》,为人形机器人领域首项认证,旨在将零部件高质量打造成为人形机器人本体高质量的基石。与此同时,在首届人形机器人马拉松比赛夺得冠军的“天工”人形机器人一体化关节将依据该规范开展全面测试认证。

认证规则解读
CR-3-05TS:2025《机器人一体化关节技术规范》和CR-3-05:2025《人形机器人一体化关节CR认证实施规则》由上海机器人产业技术研究院牵头,国地共建具身智能机器人创新中心、人形机器人(上海)有限公司、杭州宇树科技有限公司、北京小米机器人技术有限公司等人形机器人产业链重点企业,国家机器人检测与评定中心单位,高校及科研院所,检测认证机构等参与制定。
上述文件规定了机器人一体化关节的测试项目、测试方法、等级划分的认证实施办法,不仅填补了一体化关节标准方面的空白,更能为企业提供测试依据,规范企业产品,推动我国人形机器人技术向更高层次迈进,助力整个机器人行业的技术创新与产业升级。
CR-3-05TS:2025《机器人一体化关节技术规范》
范围
本技术规范适用于人形机器人、协作机器人及足式机器人关节,其他机器人关节参照执行。
主要内容
本技术规范规定了一体化关节的安全、EMC、性能、功能安全、智能化、信息安全、可靠性、环境适应性的技术要求和技术方法。
1.安全
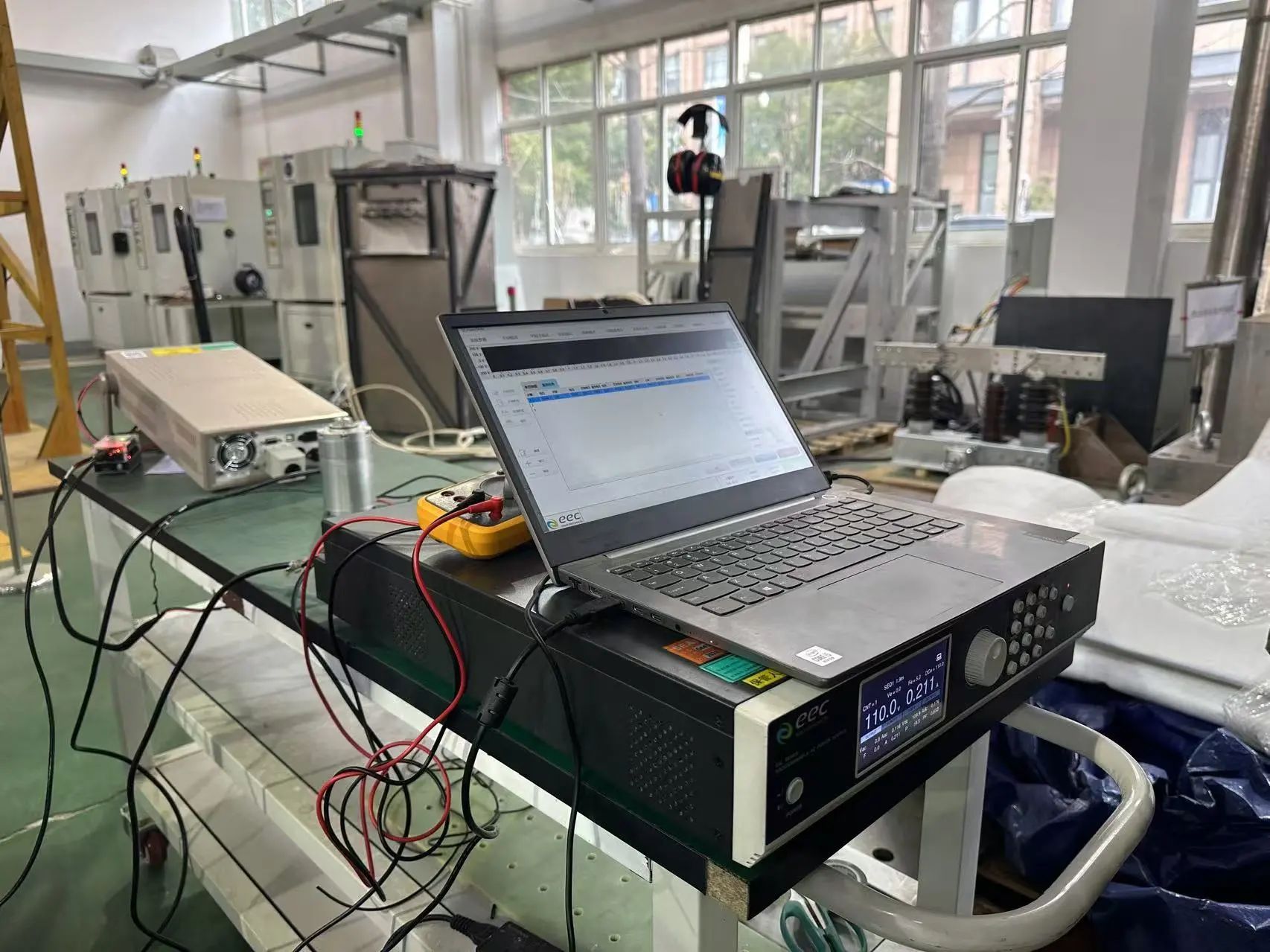
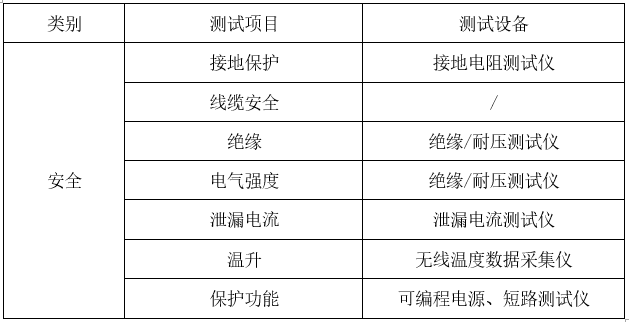
在一体化关节的设计与评估过程中,安全性是最基本、也是最关键的性能指标之一。由于一体化关节将电机、减速器、驱动控制等多个核心部件高度集成,因此其在运行中需要承受复杂的电气、热力和机械负载。为确保其在长期使用中的稳定性和可靠性,我们从接地保护、线缆安全、绝缘性能、电气强度、泄漏电流、温升控制和保护功能等多个维度进行全面的安全测试。每项测试都对应着专业的检测设备,如绝缘/耐压测试仪、泄漏电流测试仪、无线温度采集系统等,确保关节在极端工况下也不会出现安全故障。这些安全测试不仅是对产品本身质量的保障,更是保障用户与整机系统运行安全的第一道防线。
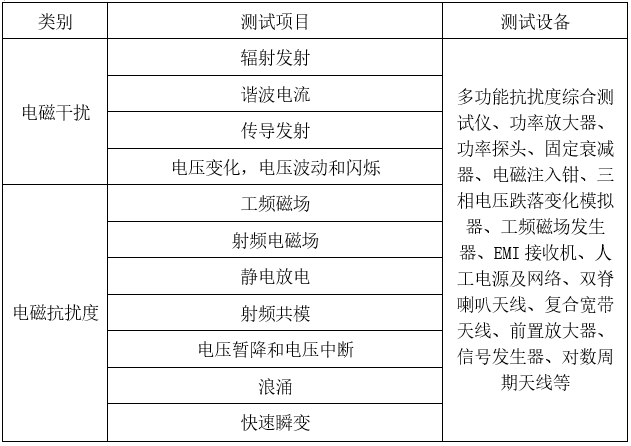
2.EMC
在一体化关节系统中,电磁兼容性(EMC)是保障其性能稳定性和系统可靠性的重要基础。由于一体化关节通常集成了伺服电机、驱动器、传感器等多个电气组件,这些部件在高速运行和实时通信过程中容易产生或受到电磁干扰(EMI)。若EMC设计不当,可能导致信号失真、控制失效,甚至干扰整机的正常运行,特别是在复杂的人形机器人多关节协调控制中影响尤为突出。因此,完善的EMC设计不仅是提升一体化关节抗干扰能力和工作环境适应性的关键,也是确保整机长期稳定运行和用户安全的重要保障。
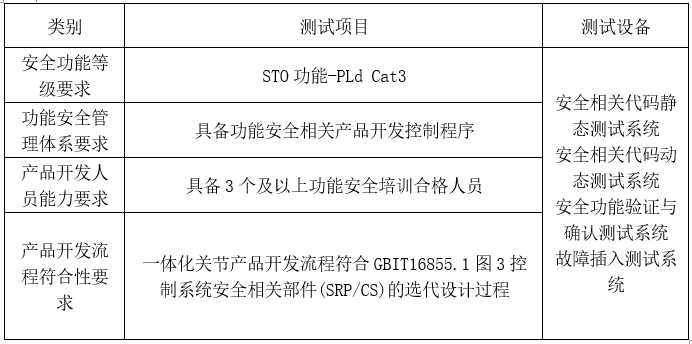
3.功能安全

功能安全是保障一体化关节在复杂应用场景中稳定、安全运行的关键。随着向人形机器人发展,关节系统需要满足更高的安全功能等级要求,以应对潜在的高风险故障。同时,建立完善的功能安全管理体系有助于规范产品全生命周期的安全流程,降低系统性失效的风险。为了确保设计和开发的安全有效性,还必须提升产品开发人员的功能安全设计能力,确保其具备安全设计与验证的专业水平。此外,遵循标准化的开发流程符合性要求,是确保产品最终具备功能安全认证能力的重要基础。四者协同,共同支撑一体化关节的安全合规性。
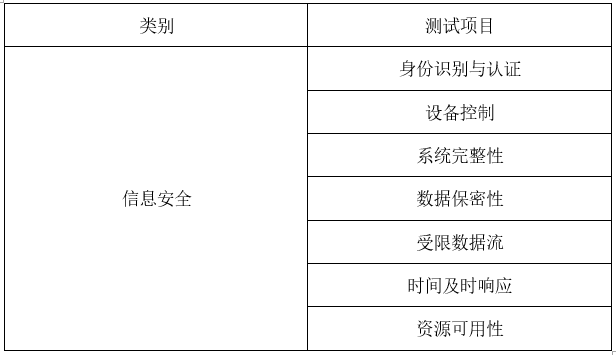
4.信息安全

在一体化关节系统中,信息安全是实现智能化、网络化协同控制的基础保障。首先,身份识别与认证确保系统访问权限合法,防止未授权指令接入;设备控制要求对各类指令执行权限进行分级管理,防止异常行为触发。为确保关键任务不被篡改,系统需具备高度的完整性保障,防止恶意代码注入或软件破坏。同时,数据保密性对传感器数据与控制信号加密处理,避免信息泄露。通过受限数据流机制,能够控制敏感数据的传输路径与对象,提高数据使用的透明度和可控性。时间及时响应能力则保障在安全机制激活或受到攻击时,系统能快速进入安全状态,避免扩散风险。最后,资源可用性确保关键计算、通信与控制资源在各种异常情况下依然可达、可控,是系统持续稳定运行的底层支撑。
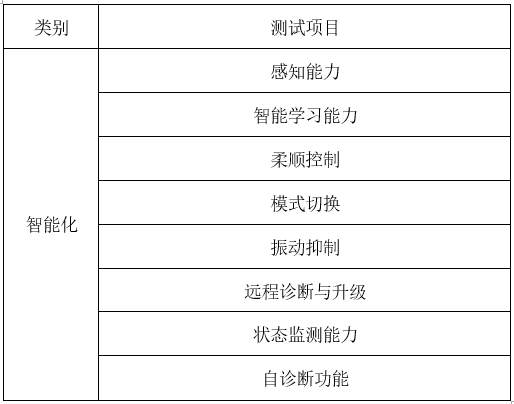
5.智能化

智能化是一体化关节实现高性能协作和复杂任务适应能力的关键。通过增强感知能力与状态监测能力,关节可实时掌握运行状态与环境信息;具备自诊断功能与远程诊断与升级能力,使设备在运行中能够主动发现故障并在线优化更新,提高运维效率。同时,依托智能学习能力,关节能够适应任务变化,自主优化控制策略。模式切换和柔顺控制能力赋予其在刚柔切换、任务重构中的灵活响应能力,而振动抑制技术则提升了在高动态动作中的稳定性与精度。整体而言,智能化赋予一体化关节以类“神经系统”的感知、决策与自适应能力,是支撑未来机器人系统安全、高效、智能运行的核心支点。
6.可靠性
在一体化关节系统中,MTBF(平均故障间隔时间)与使用寿命是衡量其可靠性与工程可用性的核心指标。MTBF体现了系统在正常工作条件下的稳定性,是评估关键部件(如电机、编码器、驱动模块)长期运行是否可靠的基础参数。较高的MTBF值意味着更低的故障率,有助于减少计划外维护次数,提升整机可用性。而使用寿命则反映关节在整个生命周期内的结构耐久性和功能保持能力,涉及轴承磨损、材料疲劳、电气绝缘老化等多个因素。尤其在长期高频动作、重载运行或特殊环境(如高温、高湿)下,寿命评估对于预测更换周期、制定维保计划具有重要意义。MTBF与寿命的协同优化不仅影响着一体化关节的总拥有成本,也是保障复杂机器人系统安全性、连续性运行的关键支撑。

7.性能
一体化关节的性能可从机械性能、电气性能、控制性能三个方面评价:机械性能决定关节的结构强度与运动能力,涉及刚度、转矩、背隙等关键指标。电气性能体现关节的能效与响应能力,包括电压电流、转矩常数、编码精度等参数。控制性能衡量系统的动态响应与精度,如响应时间、控制带宽、柔顺控制能力等。三类性能共同决定了关节是否“跑得动、控得准、用得久”,是高性能机器人系统稳定运行的基础。

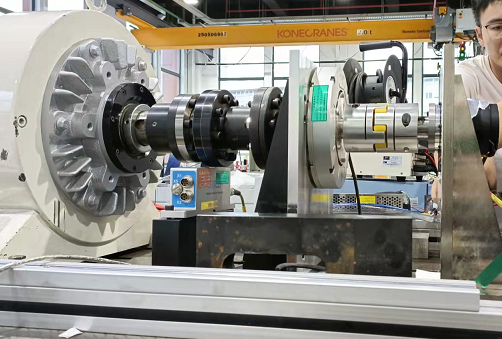
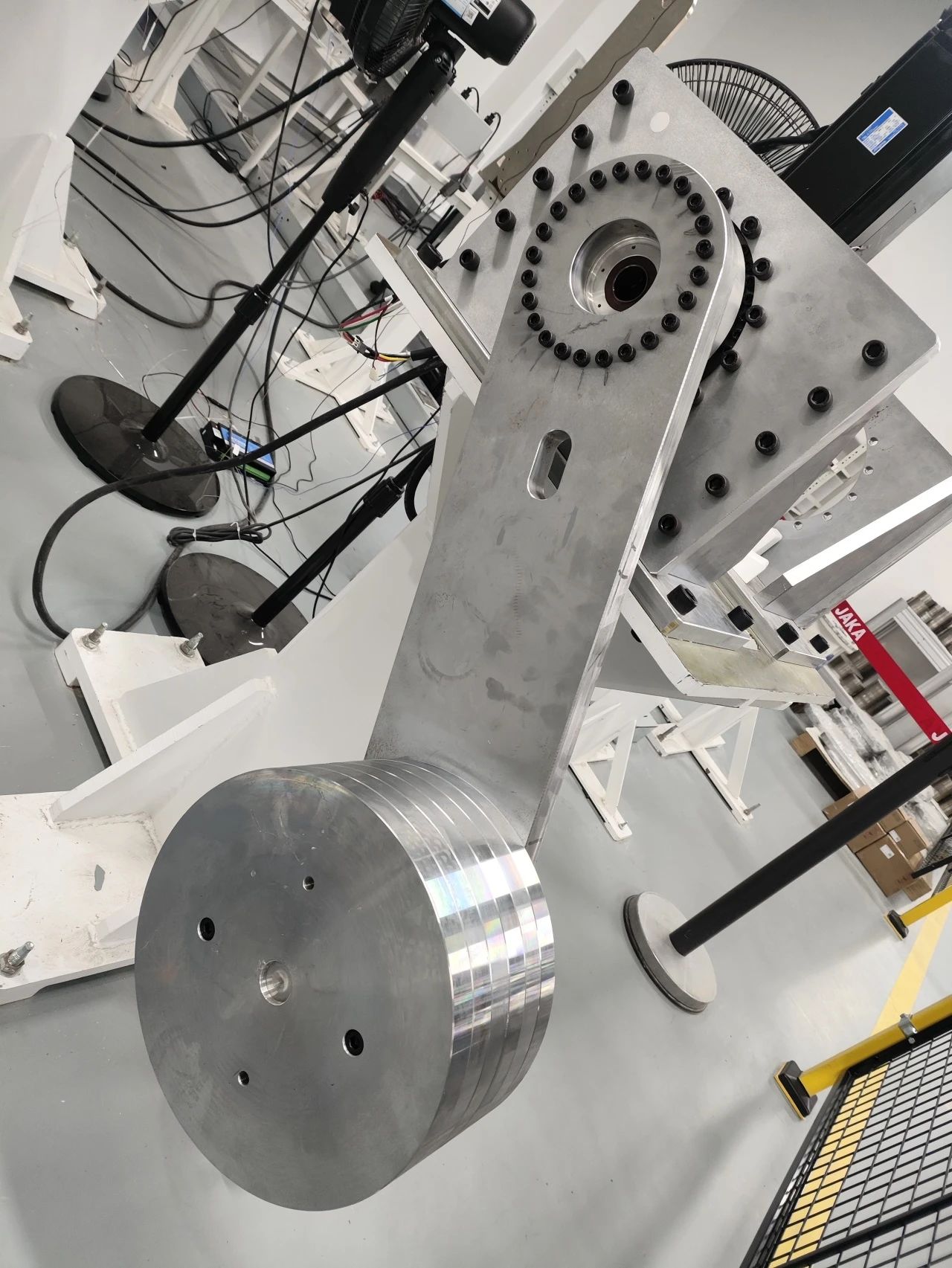
一体化关节精度测试

一体化关节恒定负载测试
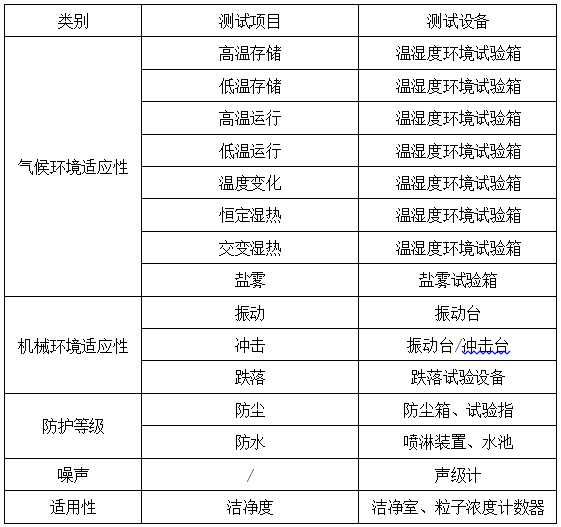
8.环境适应性

环境适应性是确保一体化关节在复杂工况下长期稳定运行的关键能力。关节需具备良好的气候环境适应性,能够耐受高低温存储与运行、湿热、温变、盐雾等极端气候条件;具备机械环境适应性,如抗振、抗冲击、抗跌落性能,以应对动态工作场景;同时需满足防护等级(如防尘、防水)要求,提升关节在多尘、水汽等恶劣环境中的耐用性。此外,噪声控制与洁净度适用性也关系到关节在医疗、实验室等特种场景中的适配能力。整体而言,良好的环境适应性是一体化关节实现高可靠性、高稳定性与广泛场景适配的基础保障。
CR-3-05:2025《人形机器人一体化关节CR认证实施规则》
范围
主要内容
本认证规则规定了人形机器人一体化关节的适用范围、认证模式、认证申请、型式试验、初始工厂检查、认证结果评价与批准、获证后的监督、产品认证标志的使用、收费。
意义
机器人一体化关节技术规范和CR认证实施规则的制定具有重要的技术价值和产业意义:
◆统一的技术标准能够确保一体化关节在扭矩、转速、精度、寿命等核心性能指标上达到行业基准,提高产品的可靠性和一致性。
◆规范化的测试方法和安全要求可以降低研发风险,保障产品在复杂工况下的稳定运行。从产业角度看,标准化的机械和电气接口设计能促进不同厂商产品的兼容互通,降低系统集成难度,推动产业链上下游的协同发展。
◆明确的实施规则有助于缩短产品研发周期,加速市场化进程,同时为行业监管和质量认证提供依据。
◆推动机器人、高端装备、医疗康复等领域的标准化发展,提升我国在智能关节领域的国际竞争力。
关于天工机器人
“天工”是国地共建具身智能机器人创新中心研发的通用人形机器人,2024年4月27日天工机器人首个版本“天工1.0 LITE”发布,这也是全球首个纯电驱拟人奔跑的全尺寸人形机器人。经历升级迭代,推出拥有完整的手臂功能、内置多种传感器的“天工1.1 PRO”,以及在“天工1.1 PRO”的基础上进一步加强交互能力的“天工 1.2 MAX”,以满足不同应用场景需求。“天工”机器人在功能上亮点突出,其运动能力出色,能以6-12公里/小时的速度稳定奔跑,适应多种复杂地形;采用“基于状态记忆的预测型强化模仿学习”方法,提升在非结构化环境中的适应性;同时具备开源开放与可扩展性,方便开发者进行二次开发。2025年2月,“天工”人形机器人在多项关键功能上实现重要技术突破。在户外真实地形测试中,“天工”机器人连续攀爬多级阶梯,成功登上北京通州区海子墙公园最高点,成为全球首例可在室外连续攀爬多级阶梯的人形机器人。2025年4月21日,国地共建具身智能机器人创新中心CTO唐剑表示,“天工 2.0” 机器人即将发售,将实现小批量量产和应用 。
2025年4月19日北京亦庄半程马拉松暨人形机器人半程马拉松在北京亦庄开跑。这是全球首个人类和人形机器人共跑的半程马拉松,“天工”机器人以2小时40分42秒的成绩率先冲线跑完全程21.0975公里,夺得冠军。

关于CR认证
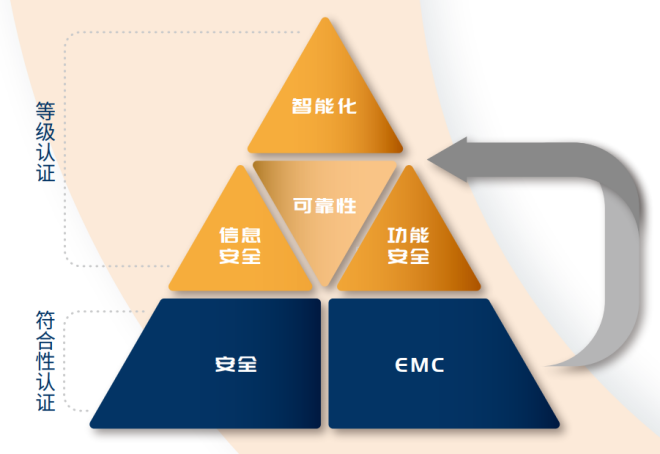
中国机器人认证(China Robot Certification,简称CR认证),于2016年由国家认监委、原质检总局联合国家发改委、工业和信息化部等部门向社会发布实施,是世界范围内唯一由国家推动的高端认证。
CR认证采用符合性认证与等级认证相结合的综合技术架构。安全和电磁兼容性作为国际通行质量底线,采用符合性认证的方式;结合可靠性、信息安全、功能安全和智能化四大高阶质量要素,建立L1~L5的技术发展型指标等级,采用企业自我选择、场景需求为牵引进行等级认证。
推荐新闻
-
上研院与睿尔曼牵手共同打造具身智能高质量标准化数据集训练场
2025-08-19 -
第一届上海市机器人等数字技术专业职称申报政策宣讲会顺利召开
2025-08-14 -
云上鏖战,智造未来——第十届 “创客中国”智能机器人中小企业创新创业大赛半决赛圆满收官,48强团队晋级总决赛!
2025-08-13 -
国家标准《工业机器人静电安全规范》等三项标准工作启动
2025-05-07 -
关于征集第十届“创客中国”智能机器人中小企业创新创业大赛评委的通知
2025-04-29 -
共探高质量、发布新成果——2025人形机器人产业高质量发展论坛顺利召开
2025-04-27 -
镇江市党政代表团一行赴机器人研究院考察
2025-04-25 -
定立场,测关节,论数据-全国人形机器人检测认证工作组2025年第二次会议于深圳顺利召开
2025-04-25 -
我院承办的第十届“创客中国”智能机器人中小企业创新创业大赛新闻发布会顺利召开
2025-04-18 -
福州人形机器人训练场启动并接入国家级测评平台
2025-04-15 -
安全性能国际接轨启新章——工业机器人CR认证新规研讨于沪召开
2025-04-15 -
政企携手谋新篇---上电科领导西南行暨卡诺普机器人全系列产品CR认证签约仪式在蓉举行
2025-03-12 -
市科委主任骆大进调研机器人研究院:肯定成绩,寄予厚望
2025-03-10 -
行业观察丨马斯克:Optimus人形机器人或将超越特斯拉汽车业务
2025-08-06 -
ABB全系列机器人CR认证战略合作签约
2025-02-25 -
KUKA机器人再添新认证
2025-01-27 -
国评中心与京沪两地人形机器人共建创新中心共同举办人形机器人产业发展论坛
2024-11-20 -
人形机器人检测认证工作组正式成立
2024-11-22 -
守安全底线、 保本体可靠、促智能发展,全国人形机器人检测认证工作组会议顺利召开
2025-02-27 -
我院专家获得"机器人"领域国际电工标准化1906奖
2024-10-14 -
国评中心(总部)为安川颁发机器人洁净级认证证书!
2024-09-25 -
JAKA拿下协作机器人全系列CR认证“001”证书
2024-09-19 -
KUKA全系列机器人获得CR认证
2024-09-14 -
2024世界机器人大会机器人行业规范检测与技术分论坛在京圆满举行
2024-08-25 -
国评中心(总部)北京测评中心正式揭牌!
2024-08-24 -
首届智能机器人分级分类评价创新论坛在上海召开
2024-07-05 -
上海成立机器人概念验证中心
2024-06-25 -
【研发成果】轻量化、模块化、智能化的移动机器人面市!
2024-06-20 -
机器人赛道逐渐拓宽,人形机器人正当时?
2024-07-01 -
【祝贺】艾利特CS系列协作机器人通过100000小时MTBF测评!
2024-01-03 -
协作无界,“加”速未来—2023首届中国(盐城)机器人+新能源产业发展大会在盐城顺利召开
2023-12-25

