
官方微信视频号


解决方案
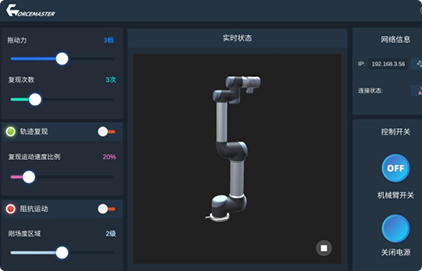
机器人力控模组解决方案
在传统机器人人机协作领域,针对机械臂的运动控制,一般仅实现机械臂的示教功能,使得操作者能够柔顺控制机械臂,对机械臂的运动路径不做要求,给使用者很大的自由度控制机械臂的柔顺运动。在肢体康复、打磨等医学和工业领域需要相应的机械臂运动控制,特别是空间中机器人的运动路径控制以及路径上机械臂的阻抗控制。市场现有的大多数机械臂厂商一般采用电流环的方式对机械臂进行运动控制,没有配置力觉感知相关传感器,降低了机器人对外界作用力的感知灵敏度,控制精度较低,而配置力觉传感器的生产厂商多将其运用于机械臂的拖动示教、恒力控制等简单功能,没有开发有关轨迹复现与阻抗控制相结合的功能,应用领域受到一定限制。
解决方案
■ 功能特点
(1)适配多种末端执行器
(2)人机工程抓握姿势
(3)柔和均匀状态光
(4)磨砂金属与细腻按钮
(5)紧凑布局最小化尺寸设计
(6)合理插口面板布局
(7)隐形散热孔、美化设计
(8)可适配不同类型的工业及协作机器人,作为提升智能化的一个关键模块



