通过多年的技术沉淀及大力的研发投入,上海机器人产业技研术究院联合上海大学于团队深度合作完成了新型三维真彩模型重构技术的项目开发及测试,形成了多项技术成果及最终成型三维真彩-激光扫描设备。

![]()



通过多年的技术沉淀及大力的研发投入,上海机器人产业技研术究院联合上海大学于团队深度合作完成了新型三维真彩模型重构技术的项目开发及测试,形成了多项技术成果及最终成型三维真彩-激光扫描设备。
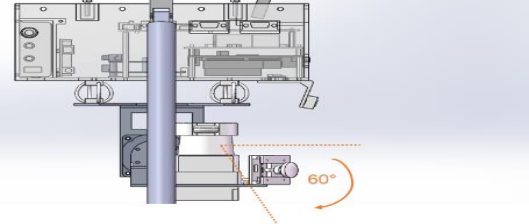
机器人点云扫描机构包含两个单目相机、激光雷达、高空转台、惯性测试单元,电气原件等等组成。双单目相机可进行畸变处理,以去除无人机悬停状态的拍摄抖动。
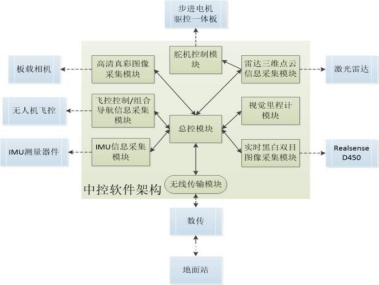
多元信息采集系统用 C++实现各传感器的通信和与地面站通信系统的建立,分为八个功能模块和一个总控模块,以实现各个功能性硬件、处理单元与操作端的互联互通。
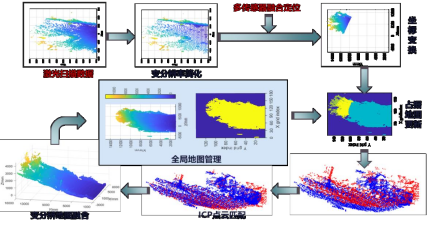
全局三维真彩点云环境建模在软件和硬件的基础上搭建交互平台,通过人机操作界面收集相机图像以及中控通信模块的点云数据、位姿信息,并且能利用点云数据对图像进行拼接处理得到合成图像,从而获取三维真彩点云图。
三维建模技术采用倾斜摄影和激光雷达扫描将两者获得的数据进行高精度高密度的三维真彩色点云融合,结合了现有技术的大部分优点,最终的建模结果能反映物体表面纹理颜色等信息,在给人更多的真实感的同时,还可以实现目标定位以及目标识别等功能。
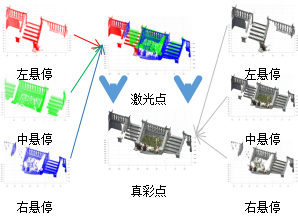
由无人机搭载的激光扫描仪从不同的悬停角度对目标物进行扫描后合成三维激光点云模型进而由双目拍摄系统所拍摄的真彩图像进行联合标定真彩覆盖,达成数据融合,以形成最终的真彩点云模型。
本产品广泛应用于针对隧道、矿井、厂区、建筑等的三维勘测与数字化建模任务。
为智慧城市、地下测绘、建筑数字孪生、地貌建模 等应用提供准确可靠的环境数据,有良好的市场推广前景 。

电话:021-62574990-191
手机:18017199312
电邮:huangmg@seari.com.cn
地址:上海市曹杨路800号18号楼


